YOLOv3损失函数学习记录 |
您所在的位置:网站首页 › yolov3的anchor box › YOLOv3损失函数学习记录 |
YOLOv3损失函数学习记录
|
title: YOLOv3 date: 2021-07-08 16:58:38 tags: no
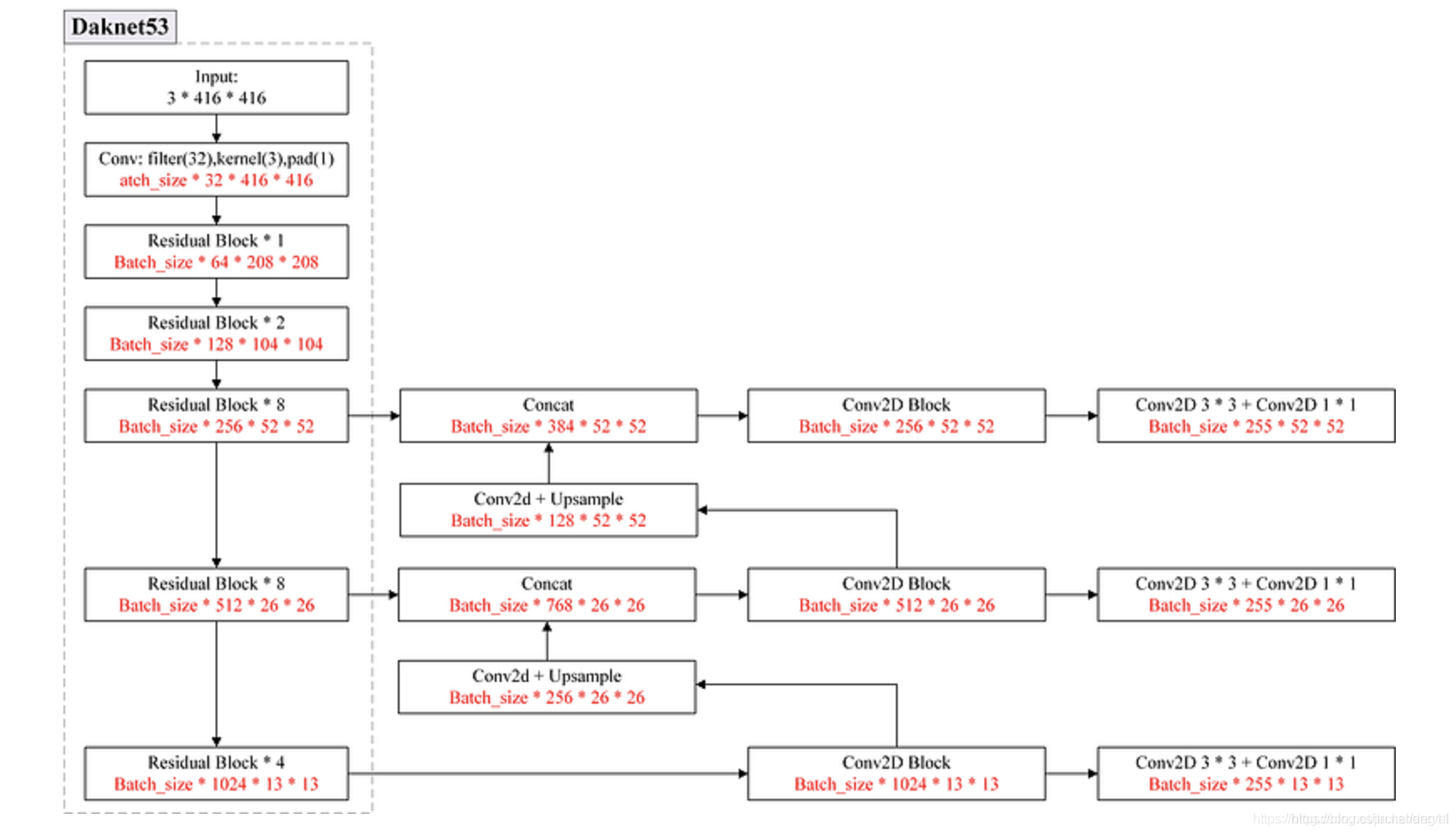
YOLOv3的网络结构图
YOLOv3采用了Darknet53的backbone(采用了Resnet的残差结构),其输出为3张不同尺度的特征图(采用了SSD的思想)。特征图越小,每个grid cell对应的感受野越大,对应大目标的检测。 拿上图中右下角 ( 255 ∗ 13 ∗ 13 ) (2551313) (255∗13∗13)的特征图为例, 13 ∗ 13 是特征图大小,255可以拆分为 3 ∗ ( 4 + 1 + 80 ) ,3表示一个grid cell对应3个anchor,4表示anchor的中心坐标xy和宽高wh,1表示该anchor是否包含目标的置信度,80表示coco数据集的80个类别。 anchor的选择与yolov2一样,采用了kmeans的思想。不同的是这里的K值为9。聚类后,尺寸最大的三个框分配给特征图最小的(感受野大),用来检测大目标;最小的3个框分给特征图最大的(感受野小),用以检测小目标;剩下的3个框分给中间尺寸的特征图。 因此,yolov3的输出维度是 B a t c h ∗ 3 ∗ ( 4 + 1 + 80 ) ∗ ( 13 ∗ 13 + 26 ∗ 26 + 52 ∗ 52 ) 。 YOLOv3损失函数的全貌
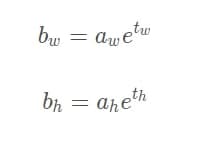
anchor box其实就是从训练集的所有ground truth box中统计(使用k-means)出来的在训练集中最经常出现的几个box形状和尺寸。(有助于模型快速收敛) anchor box其实就是对预测的对象范围进行约束,并加入了尺寸先验经验,从而实现多尺度学习的目的。 怎么在实际的模型中加入anchor box的先验经验呢? 最终负责预测grid cell中对象的box的最小单元是bounding box,那我们可以让一个grid cell输出(预测)多个bounding box,然后每个bounding box负责预测不同的形状不就行了?比如前面例子中的3个不同形状的anchor box,我们的一个grid cell会输出3个参数相同的bounding box,第一个bounding box负责预测的形状与anchor box 1类似的box,其他两个bounding box依次类推。作者在YOLOv3中取消了v2之前每个grid cell只负责预测一个对象的限制,也就是说grid cell中的三个bounding box都可以预测对象,当然他们应该对应不同的ground truth。那么如何在训练中确定哪个bounding box负责某个ground truth呢?方法是求出每个grid cell中每个anchor box与ground truth box的IOU(交并比),IOU最大的anchor box对应的bounding box就负责预测该ground truth,也就是对应的对象,后面还会提到负责预测的问题。 怎么告诉模型第一个bounding box负责预测的形状与anchor box 1类似,第二个bounding box负责预测的形状与anchor box 2类似? YOLO的做法是不让bounding box直接预测实际box的宽和高(w,h),而是将预测的宽和高分别与anchor box的宽和高绑定,这样不管一开始bounding box输出的(w,h)是怎样的,经过转化后都是与anchor box的宽和高相关,这样经过很多次惩罚训练后,每个bounding box就知道自己该负责怎样形状的box预测了。这个绑定的关系是什么?就涉及到了anchor box的计算。 1.2计算前提需要知道, c_x和c_y的坐标是(0,0) (0,1),(0,2),(0,3)…(0,13),(1,0),(1,1),(1,2),(1,3)…(1,13)等等 bouding box的输出应当为:t_x和t_y和t_w和t_h 而真实的预测box应当是:b_x和b_y和b_w和b_h 刚刚说的绑定关系就是
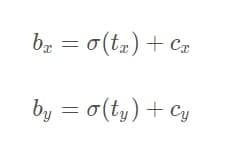
其中,a_w和a_h为anchor box的宽和高, t_w和t_h为bounding box直接预测出的宽和高, b_w和b_h为转换后预测的实际宽和高, 这里的绑定只和w和h有关,与x,y无关,但是和grid_cell的归属有关 既然提到了最终预测的宽和高公式,那我们也就直接带出最终预测输出的box中心坐标(bx,by)的计算公式: 前面提到过box中心坐标总是落在相应的grid cell中的,所以bounding box直接预测出的tx和ty也是相对grid cell来说的,要想转换成最终输出的绝对坐标,需要下面的转换公式:
σ符号是sigmoid
p_w实际就是上面的a_w(anchor_w) 训练 关于box参数的转换还有一点值得一提,作者在训练中并不是将t_x,t_y,t_w,t_h转换为b_x,b_y,b_w,b_h后与ground truth box的对应参数求误差,而是使用上述公式的逆运算将ground truth box的参数转换为与t_x,t_y,t_w,t_h对应的数据进行误差运算 下图为对应的数据表达
我懒了,一个公式就表明吧
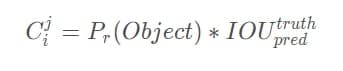
对象条件类别概率是一组概率的数组,数组的长度为当前模型检测的类别种类数量,它的意义是当bounding box认为当前box中有对象时,要检测的所有类别中每种类别的概率. 其实这个和分类模型最后使用softmax函数输出的一组类别概率是类似的,只是二者存在两点不同: YOLO的对象类别概率中没有background一项,也不需要,因为对background的预测已经交给置信度了,所以它的输出是有条件的,那就是在置信度表示当前box有对象的前提下,所以条件概率的数学形式为Pr(classi∣Object);分类模型中最后输出之前使用softmax求出每个类别的概率,也就是说各个类别之间是互斥的,而YOLOv3算法的每个类别概率是单独用逻辑回归函数(sigmoid函数)计算得出了,所以每个类别不必是互斥的,也就是说一个对象可以被预测出多个类别。这个想法其实是有一些YOLO9000的意思的,因为YOLOv3已经有9000类似的功能,不同只是不能像9000一样,同时使用分类数据集和对象检测数据集,且类别之间的词性是有从属关系的。 剖析损失函数根据pytorch的代码,Yolov3的损失函数主要包括3个部分: 对于正例,bounding box和ground true之间的位置坐标(x,y)和大小(w,h)的差异,采用MSE损失函数 『对应损失函数图中的1,2两行』对于正例和负例,计算置信度和真实之间的交叉熵 『对应损失函数图中的3,4两行』对于正例,计算80个类别维度与target的one-hot向量间的交叉熵损失 『对应损失函数图中的第5行』参数I_ij^obj: 表示第i个grid_cell的第j个anchor box负责检测这个obj,如果负责则值 == 1,否则==0。 参数I_ij^noobj: 表示第i个grid_cell的第j个anchor box不负责检测这个obj,如果不负责则值 == 1,否则==0。 负责的含义指:那第 i i i个网格的 B B B个anchor box中与该对象的ground truth box的IOU在所有的anchor box(与一个grid cell中所有bounding box对应,COCO数据集中是9个)与ground truth box的IOU中最大,那它就负责预测这个对象,因为这个形状、尺寸最符合当前这个对象,此时就算负责检测这个obj 但是代码里,只有max IOU才是正样本,而小于阈值IOU的则属于负样本 参数置信度C_i^j 训练中,hat_C_ij表示真实值,hat_C_ij的取值是由grid cell的bounding box有没有负责预测某个对象决定的。如果负责,那么值 == 1,否则==0. 如何确定某个grid cell的bounding box是否负责预测该grid cell中的对象:前面在说明anchor box的时候提到每个bounding box负责预测的形状是依据与其对应的anchor box相关的,那这个anchor box与该对象的ground truth box的IOU在所有的anchor box(与一个grid cell中所有bounding box对应,COCO数据集中是9个)与ground truth box的IOU中最大,那它就负责预测这个对象,因为这个形状、尺寸最符合当前这个对象,这时hat_C_i^j=1 (其实我在想,为什么要加入负样本??) (因为这个anchor box不负责目标,那么这个anchor box产生的bounding box的坐标,宽高,分类都不重要,也就不需要计算坐标,宽高,分类的损失函数,但是置信度仍然重要,因为置信度还可以表示这个anchor box产生的bounding box中并不包含对象,所以仍然需要计算置信度损失函数的。) (没懂) 中心坐标误差 实际上,网络输出的应当是 t_x 和 t_y ,然后通过 σ ( t x ) 和 σ ( t y ) ,再乘以步长,就映射到了 416 ∗ 416 大小的图上的目标了,所以在计算误差的时候,其实也是用的这一项 σ ( t x ) ∗ s t r i d e \和 σ ( t y ) ∗ s t r i d e 和真实目标经过resize到 416 ∗ 416 上的目标的大小,去计算误差。 整个这一项表示的是:当第 i 个网格的第 j 个anchor box负责某一个真实目标时,那么这个anchor box所产生的bounding box就应该去和真实目标的box去比较,计算得到中心坐标误差。 『实际上我们产生一个疑问,sigmoid后再乘stride会不会有点奇怪,sigmoid不是线性的呀』 置信度误差 损失函数分为两部分:有物体,没有物体,其中没有物体损失部分还增加了权重系数。添加权重系数的原因是,对于一幅图像,一般而言大部分内容是不包含待检测物体的,这样会导致没有物体的计算部分贡献会大于有物体的计算部分,这会导致网络倾向于预测单元格不含有物体。因此,我们要减少没有物体计算部分的贡献权重,比如取值为:0.5。 另外,这里有个例外,当某个bounding box不负责对应grid cell中ground truth box的预测,但是又与该ground truth box的IOU大于设定的阈值时(论文中是0.5,darknet中针对COCO数据集使用的是0.7),忽略该bounding box所有输出的对loss的误差贡献,包括置信度误差。其他情况(负责某个对象即IOU最大的,不负责对象即IOU不是最大,而且IOU |




【本文地址】